
Hello, when using the Bufferer transformer on points, a circular polygon is generated. The number of vertices constructing the circle is a function of parameters like the corner endcap type + interpolation angle. I'm good with this.
What I would like to know is if there is some logic to how the vertices of the buffer are generated. That is, how is the first point on the circle determined (since all others would follow from there based on the number of vertices / interpolation angle).
To provide context, we are capturing points that fall within the buffers and we have some edge cases that appear would be captured if only the circle were rotated or we increased the number of vertices. We want to see if there is a way other than increasing the number of vertices since this tends to slow down downstream transformers.
In the picture below, you will see that depending on the rotation of the points, the green dot may or may not be captured. In the case shown, it's captured by the grey filled circle (only portion shown) while it's missed by the red outlined circle.

Thank you



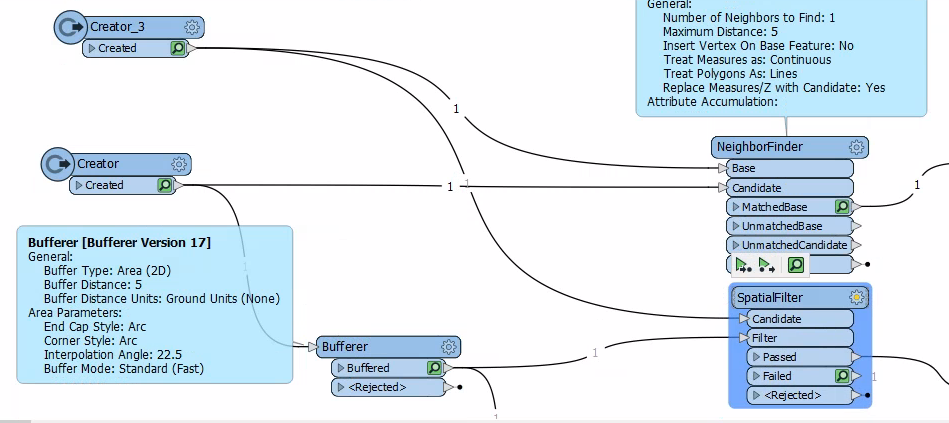 As you can see, a point fails the test of falling within the point that has been buffered to 5m but is found with a maximum distance of 5 with the NeighborFinder
As you can see, a point fails the test of falling within the point that has been buffered to 5m but is found with a maximum distance of 5 with the NeighborFinder
