")
Hey there,
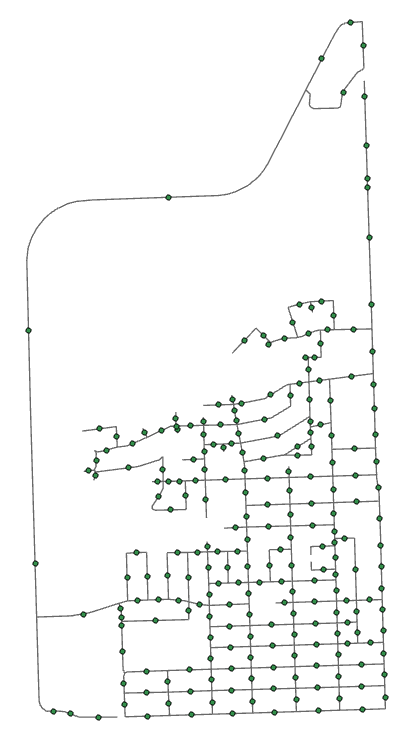
Trying to figure out of this is possible with the current data I have. I have a road network that looks like this of which I generated points for the mid-points of the segments. The road network does have froms and tos.
Essentially we have a camera on a car that needs to traverse this network in the same direction every time to make comparisons going forward. So ideally im looking for the quickest way to travel this route hitting ALL of the roads and have something that can be repeated every month where the driver is going the same direction every time. Is there an article on this I can't find?