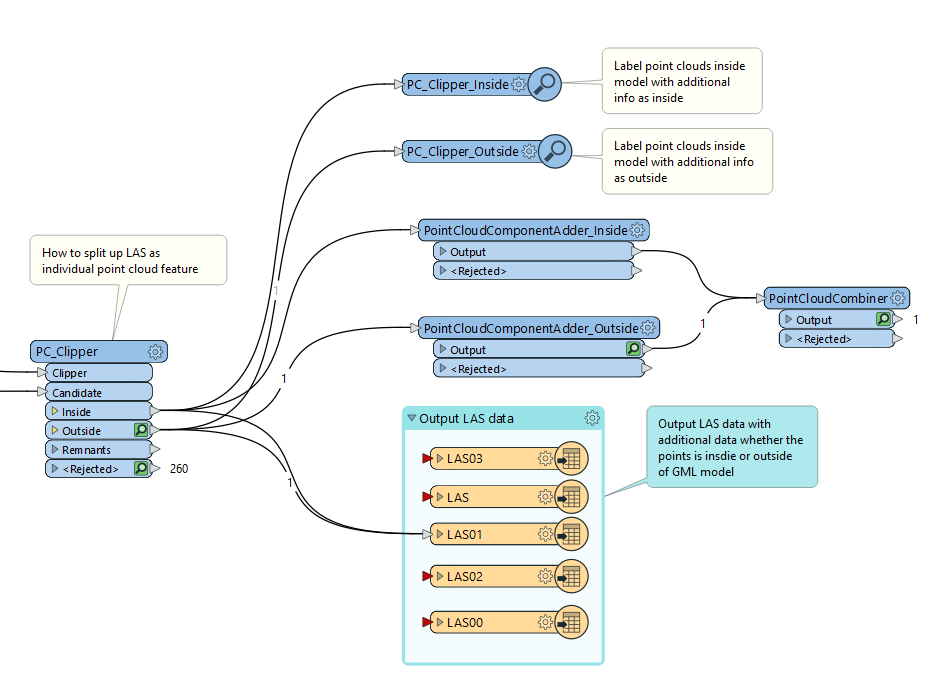
I am trying to add an extra label for each point of the point cloud based on whether or not they were located inside or outside the gml building model.
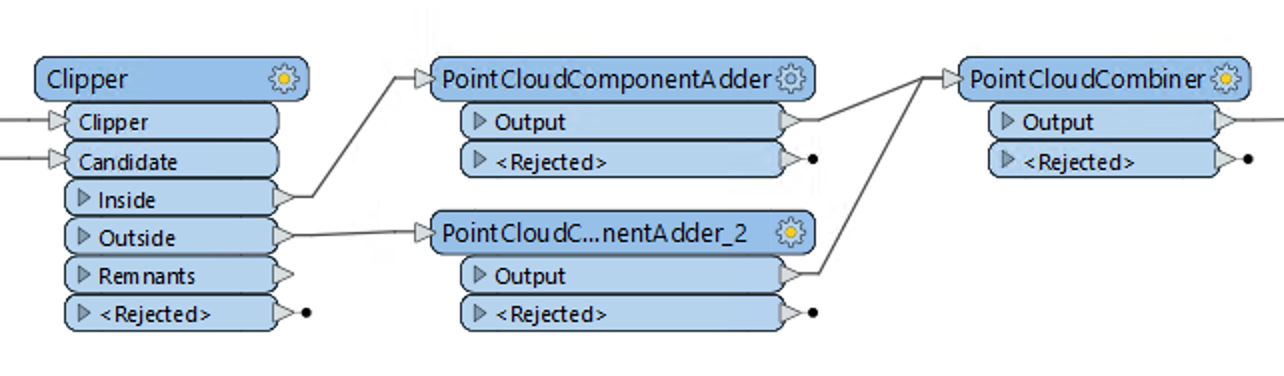
When I clipped a model with my point cloud data with "Clipper", it only identified that point cloud was outside and that point cloud data was identified as 1 feature own on its.
How do I label/mark each point in the point cloud whether they clipped with the model or not and then save it as an extra information/variable in a new las file.
")