Hi FME:ers!
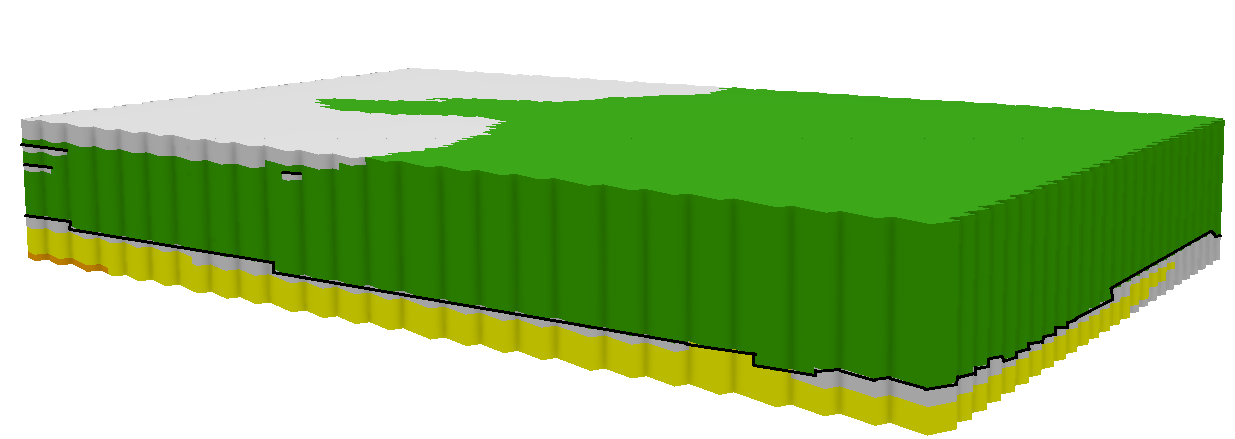
My task is to find a way to create polygons at the bottom of each solid geometry classes. The created polygons should follow the solid geometry classes bottom edges (x, y and z). I have marked a dark line in the picture for more understanding.