Hi,
I have classified LiDAR data containing low, medium, and high vegetation points, and I need to convert the vegetation point clouds into canopy polygons.
What is the recommended FME workflow for this?
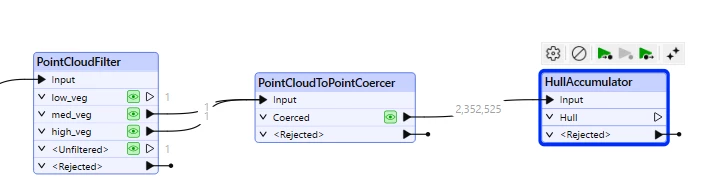
I have tested the HullAccumulator transformer, and the results look reasonably good and follow the vegetation points quite well. However, I’m not sure whether this is the most appropriate or reliable method for producing canopy polygons, especially for canopy coverage calculations.
Would a raster-based workflow be more suitable, or is HullAccumulator commonly used for this purpose?
Thanks.