Hello all, I've been pointed into the direction of FME by someone on Reddit with the below query. Is anyone able to help me achieve this output of multiple KML files with a workflow in FME Desktop...
I've been provided with the location of a solar farm to fly over with my drone and a thermal camera. The CAD drawing of the solar farm has been geo-referenced and sliced into a tile layer: http://abovesurveying.s3-website-eu-west-1.amazonaws.com/Spriggs%20Farm%20v2_Thaxted_CAD/{z}/{x}/{y}.png
I have an app on the iPad that controls the drone that will point it north as a constant heading and fly from end to end of the solar panels. This is all achieved by uploading a KML file to the app. At the moment I manually create the KML files with LineString coordinates limited to 1.80 kilometers or 99 waypoints (whichever comes first). This is going to be extremely time consuming. So....
I have created three different KML files which are attached:
- Launch locations. These will be different locations around the solar farm that are designated as safe to launch from.
- Obstacles. These will be things like powerlines, tall trees, buildings, wind turbines, etc. This will be written into a KML file as Polygons (shapes).
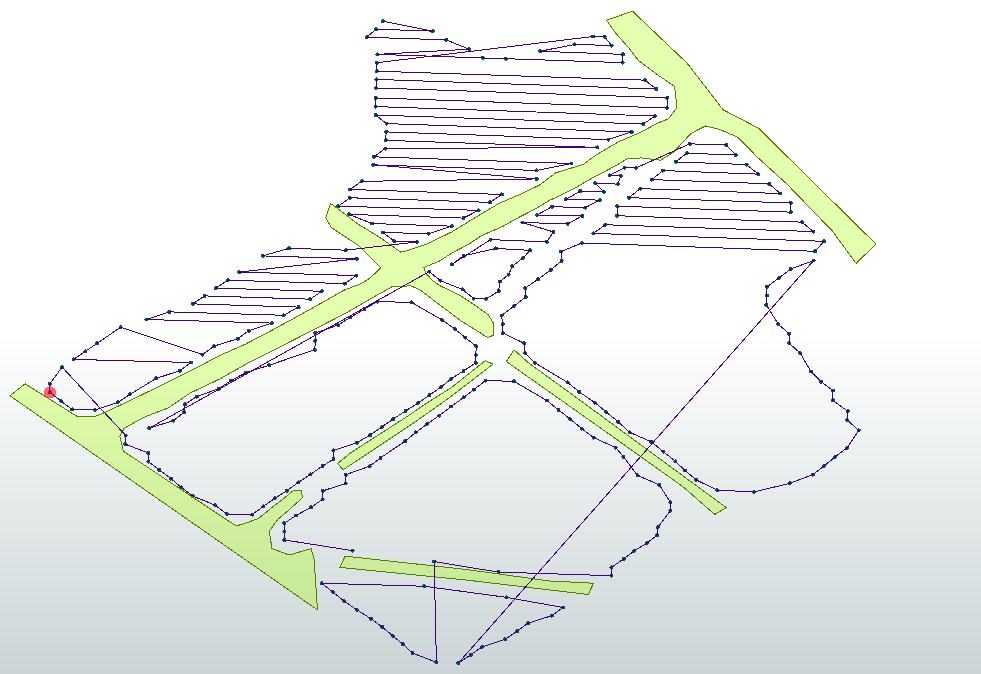
- Waypoints. These will be literally every single end of row of solar panels, the start point and end point of a pass along a row of panels.
I have created these files for the Spriggs location above to test.
Is there a way for FME to digest all this information and create the most efficient routes between all the points not exceeding the distance and waypoint limits or, flying over obstacles?
I'm looking for the output to be multiple KML files that cover the entire solar farm for flight. Each of these files is a section of the solar farm or a zone, call it what you will. Must be KML as that is what the iPad app for the drone accepts.
I can see an issue being that the example solar farm given has some ends of rows very close to others with a hedge row between them. So will the workflow that creates the output think that flying over the hedge is the correct survey area, or will it know that the other end of row is much further away? Or do I negate this problem and block out the hedge as an obstacle even though it is technically low enough to fly over?
Routes are east/west and west/east waypoints then traveling north/south or south/north to get to the next east/west west/east row of panels. The entire purpose is to make the output more efficient than what I could create manually and also speed up the process. I'm guessing my input data has to be pretty spot on.
Additionally I need each of these sections/zones to be listed in a table specifying which launch location they're using, their total distance in kilometers or meters and how many waypoints are within the flight. Distance and waypoint count to include the launch and landing as a waypoint and the distance to and from this location. This is because it is important the flight doesn't exceed the distance parameter set due to batteries not lasting much longer.
Any ideas on how to achieve this problem?