


Hi
I have a tiled point cloud.
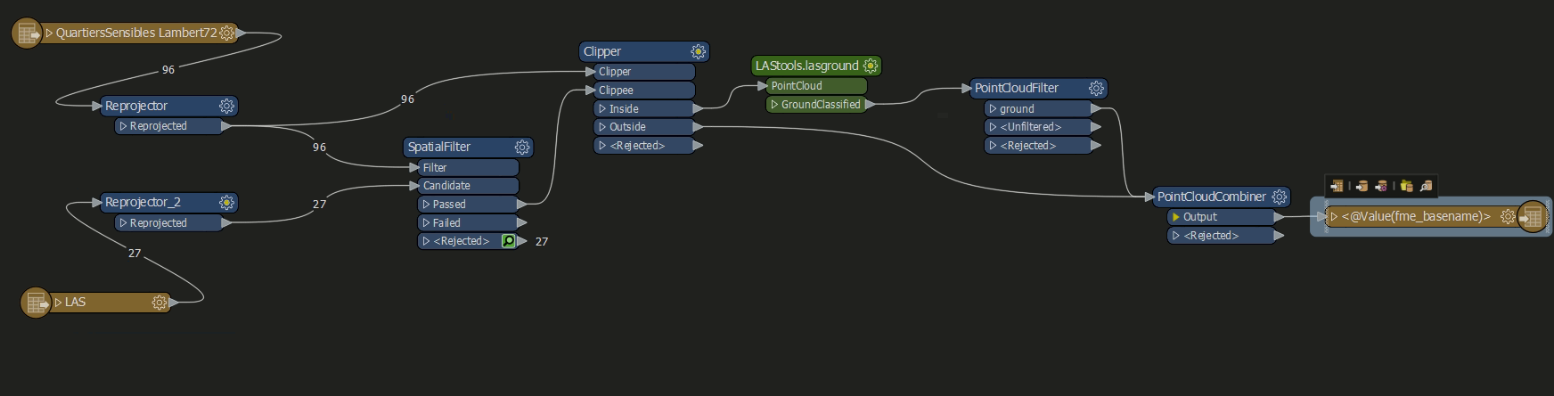
I want to be able to test/check what tiles are intersecting, within, touching etc with polygons from a shapefile.
If a tile is overlapping then the part that's inside the polygon needs to be ground filtered. The other part needs to stay the same.
It seems that the spatialfilter doesn't work with a point cloud. I get the wrong geometry message.
Is there another way or another transformer I can use?
*** Dont forget the World Tour Webinars: TUESDAY, MAY 5 2020***

