Hi everyone,
Noob here.
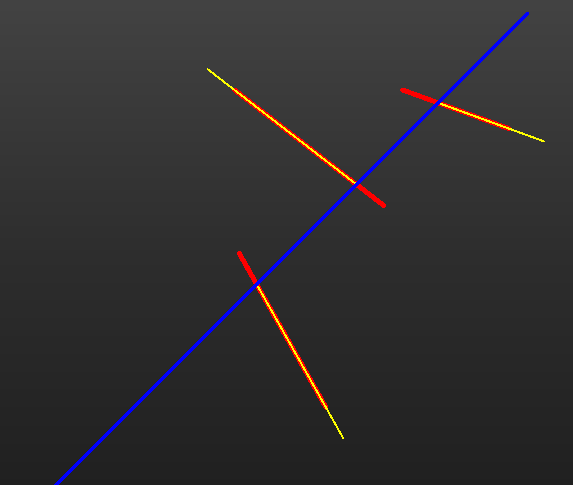
I want to translate (move) the red lines in order to have the ending (or initial point) on the red line over the blu line. The length of the red line does not have to change.
I tried with anchored snapper, but I think I need an anchored mover?!
The red lines can also have many many vertices.
Thanks,
Have a nice day.






 You probably also want to think about whether you want to shift in different directions depending on whether the start or end point of the line is closest
You probably also want to think about whether you want to shift in different directions depending on whether the start or end point of the line is closest