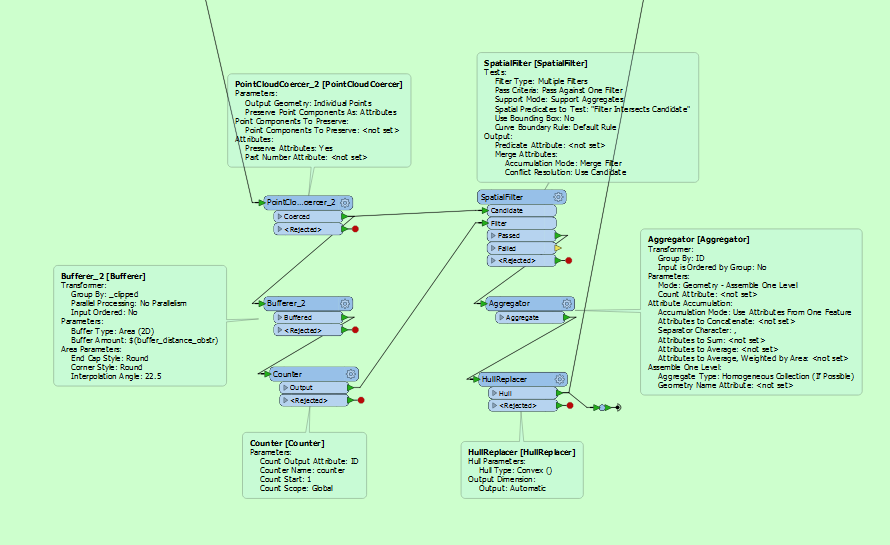
To do that, I create polygons representing the hull of point cloud data using the following steps:
coerce point cloud data to individiual points,
Bufferer every individiual point
Dissolve the buffers that overlaps/intersects
Create a polygon using hull replacer
How can I perform such operation without using a pointcloudCoercer because it is too much time consuming.
Any idea on how to improve this part of my workbench?
Thanks
Best answer by takashi
I don't think there is so efficient way, but a better way at least than the PointCloudCoercer is:
NumericRasterizer (Size Specification: CellSize): Transform the point cloud to a numeric raster, filling background with Nodata.
RasterExtentsCoercer (Extents Type: Data Extents): Transform the data existing areas of the raster to a multiarea.
Deaggregator: Decompose the multiarea into individual polygons.
Clipper: Clip the original point cloud by the polygons (i.e. separate the point cloud into groups).
HullReplacer: Transform the clipped point clouds to hull polygons.
Bufferer: Make buffers from the polygons if necessary.
This post is closed to further activity.
It may be an old question, an answered question, an implemented idea, or a notification-only post.
Please check post dates before relying on any information in a question or answer.
For follow-up or related questions, please post a new question or idea.
If there is a genuine update to be made, please contact us and request that the post is reopened.
Is the source dataset is a single point cloud and do you need to separate the points within the point cloud into some groups according spatial proximity?
Is the source dataset is a single point cloud and do you need to separate the points within the point cloud into some groups according spatial proximity?
Correct @takashi. The data source is a single point cloud.