
Hello!
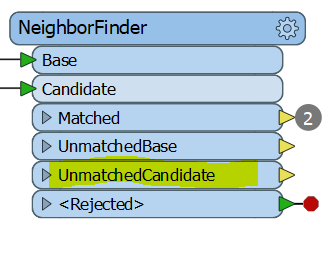
I am using NeighborFinder to match points from two different datasets. Once a point has been matched I would like to exclude it from the candidates. How would I do this?

Hello!
I am using NeighborFinder to match points from two different datasets. Once a point has been matched I would like to exclude it from the candidates. How would I do this?
No account yet? Create an account
Enter your E-mail address. We'll send you an e-mail with instructions to reset your password.





")
