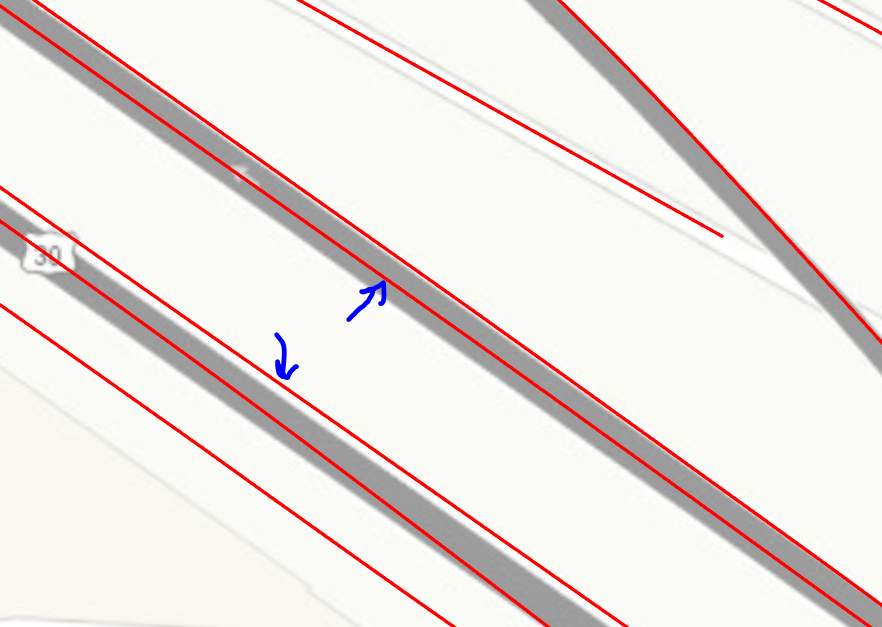
I am working with a roads dataset, and need to assign what is primary and what is secondary for each line segment. I have the line segments in a single feature class. Each segment has a Unique ID, a routeID, then the mile marker for the start and endpoint of the line. What I need to do is compare the mile markers for each line segment that share a routeID. The end goal (as illustrated in the attached image) is to eliminate areas of overlap (which will be marked secondary). I plan to accomplish this by seeing where the mile marker endpoint of one segment falls within the range of another segment that shares a routeid. So in the example attached, the segment that stretches from 5-7 would be marked as an overlap because endpoint 5 falls within the segment that stretches 0-6. Thanks!

Question
Is there a way to iterate through a single feature class, comparing the value of one attribute to the next in a list?






Login to the community
No account yet? Create an account
An FME Account is required to contribute
LoginEnter your E-mail address. We'll send you an e-mail with instructions to reset your password.