Hi Guys,
I hope I explain my self clearly.
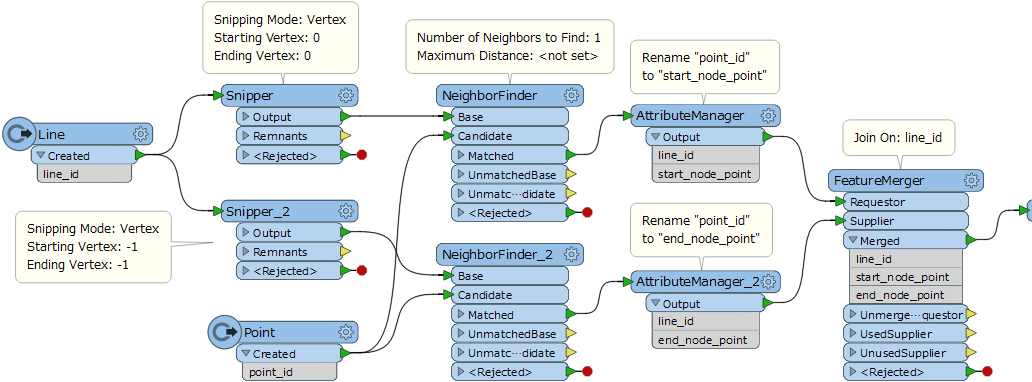
My Problem is: I have a point dataset and a line dataset. What I want to be able to do is find the point that is the closest to the start and end node of each line object and display it in a csv file etc.
The lines could have multiple vertices in them but I only need to know which point is closest to the start and which point is closest to the end.
Both datasets are shape files.
Is there any way this can be accomplished?
so the output would look like
line_idline detailsstart_node_pointend_node_point1234sdgsgfg9876541234565678sgsfhdfhd546214748565