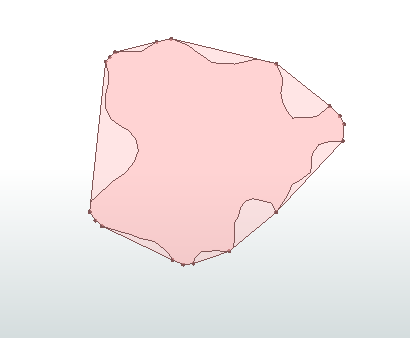
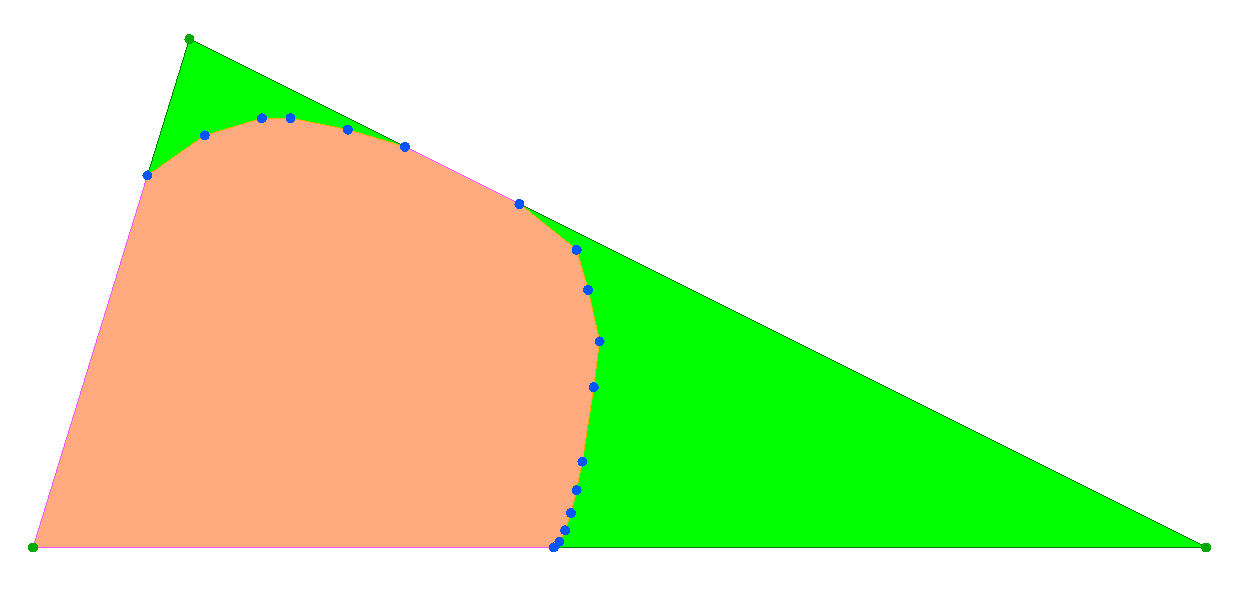
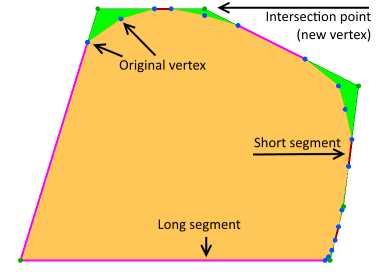
There certainly seems to be a way for polygons like the one in your image, consisting of a number of long segments and a number of (often grouped) short segments. Remove the short segments, calculate the intersection points of the remaining segments and their neighbours. The intersection points span a convex polygon that completely contains the original polygon, and has fewer vertices.
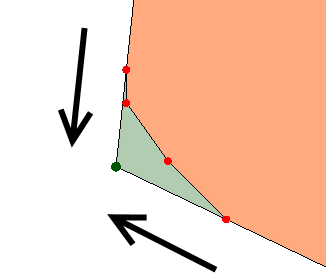 Unfortunately this algorithm does not work for all convex polygons. When removing all short segments, there may be too few segments remaining, or a pair of remaining segments may intersect on the wrong side, or the removal of all short segments may lead to an intersection point very distant from the original polygon.
Unfortunately this algorithm does not work for all convex polygons. When removing all short segments, there may be too few segments remaining, or a pair of remaining segments may intersect on the wrong side, or the removal of all short segments may lead to an intersection point very distant from the original polygon.
 In cases like this you will get better results by keeping some short segments.
In cases like this you will get better results by keeping some short segments.
 The attached workspace does all this. For simplicity I have chosen to determine which short segments to keep by simply looking at the number of consecutive short segments, and the maximum number of short segments to skip. There may be better ways, but this was simple to implement.
The attached workspace does all this. For simplicity I have chosen to determine which short segments to keep by simply looking at the number of consecutive short segments, and the maximum number of short segments to skip. There may be better ways, but this was simple to implement.
The workspace contains some sample convex polygons to simplify.
Click the custom transformer ConvexPolygonSimplifier, set the parameters (Minimum Length = 14, Maximum Number of Short Segments to Skip = 4), then run the workspace. Also look what happens when you set parameter Maximum Number of Short Segments to Skip to 0.
Please don't expect this custom transformer to be faultless. But I hope it will give you some inspiration, when you look into its inner workings. Good luck!