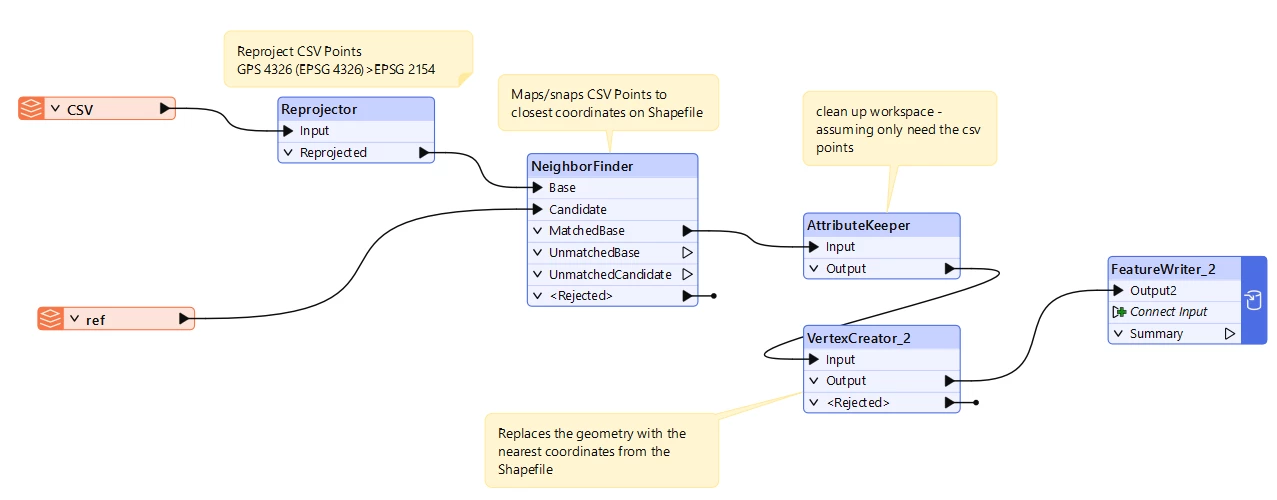
I have images taken by a camera mounted on a vehicle, with GPS (4326) coordinates recorded every millisecond. I also have a road reference dataset in a shapefile (epsg :2154) and I need to match my millisecond-spaced images (and their GPS coordinates) to this road reference. There will obviously be some discrepancies between the GPS measurements and the reference dataset, but how can I best align the GPS data with the road reference? What is the best method to do this?
If you’d like, I can also help you rephrase it more formally or technically.
Thank you