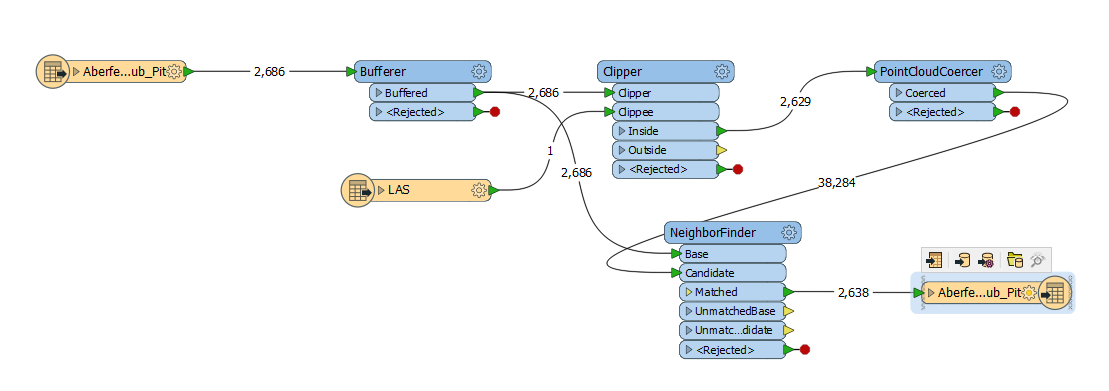
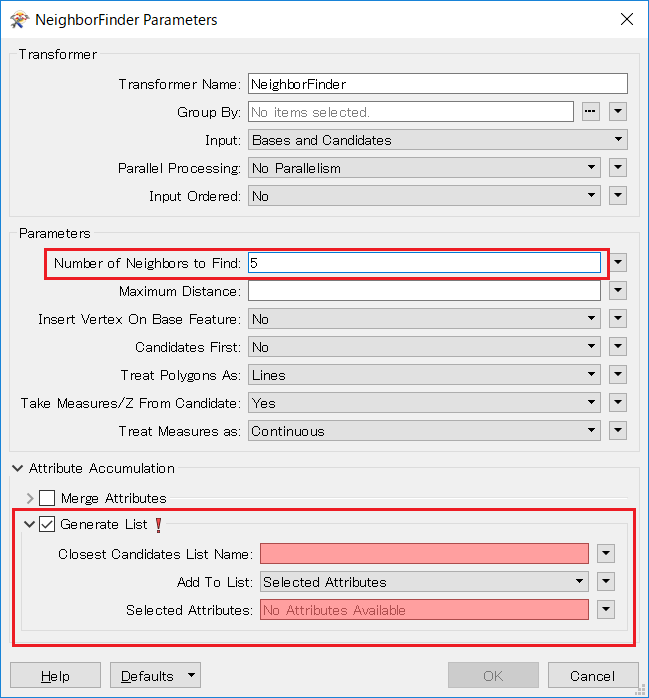
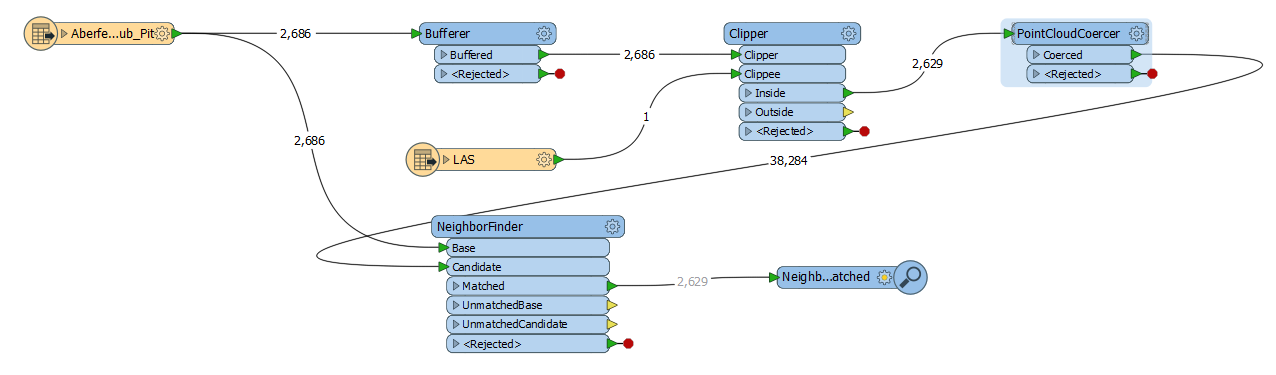
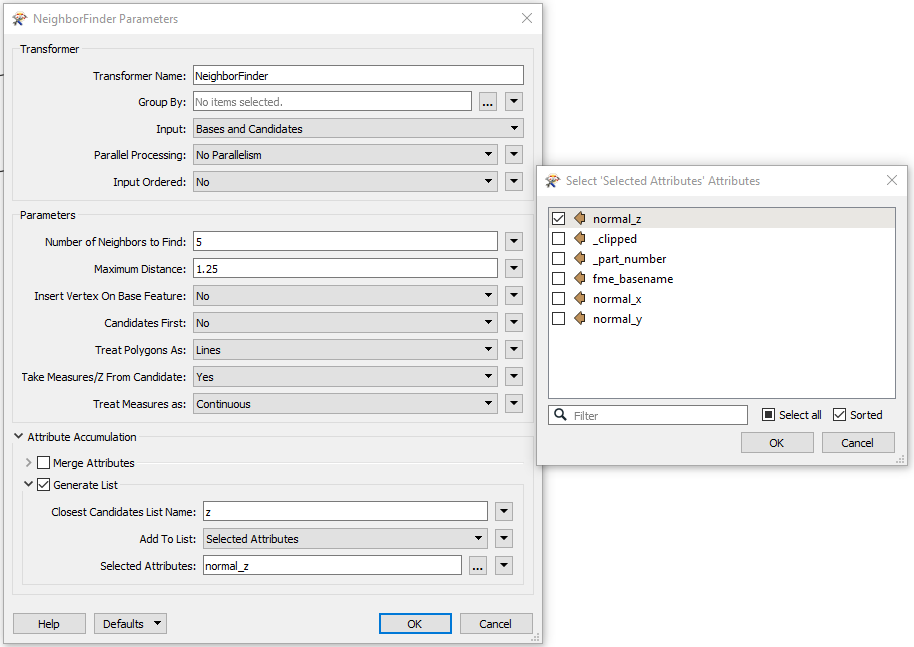
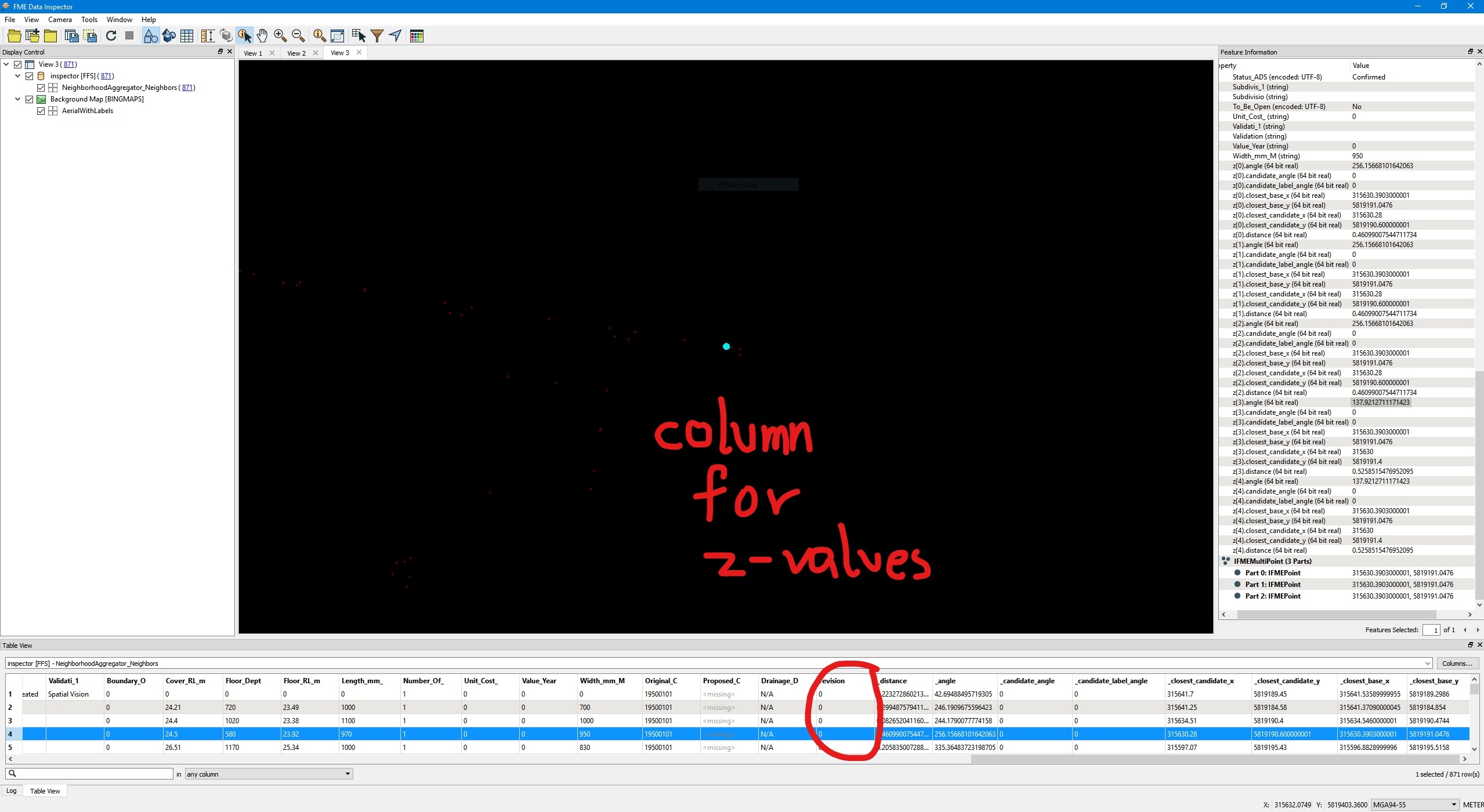
I am a first time FME user. I want to analyse the closest LiDAR points that are to my point data (pit). I tried using NeighborFinder but I guess it does not like LiDAR data and produces a empty .shp file or .gdb file. I want my .shp or .gdb with the nearest 5 LiDAR points that are averaged to produce a z value for my point vector data (pit data). It will be very kind if someone could help me with what code I would need to produce the required result?
PS: plz disregard the aerial image in the background.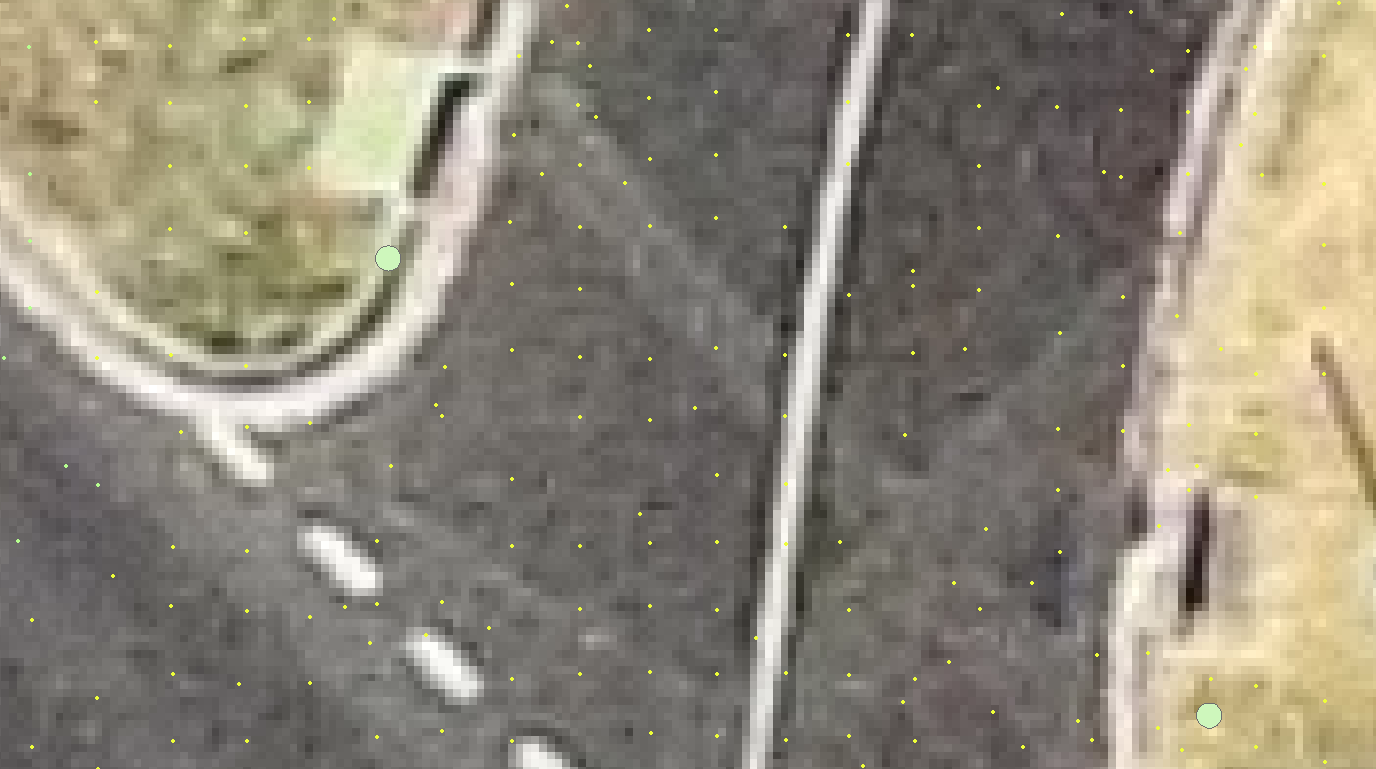




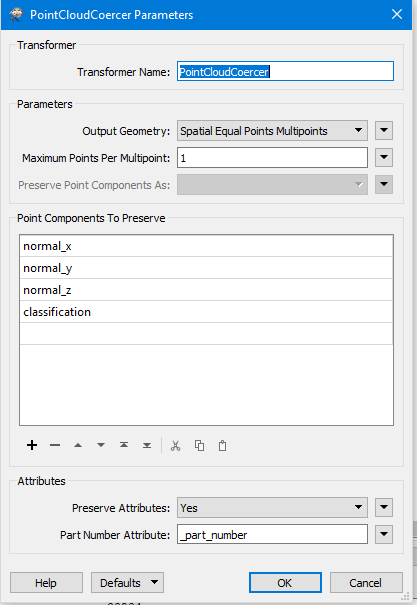
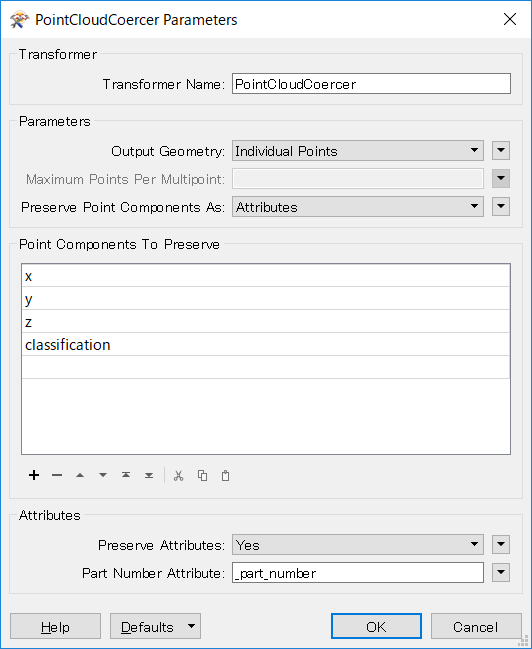
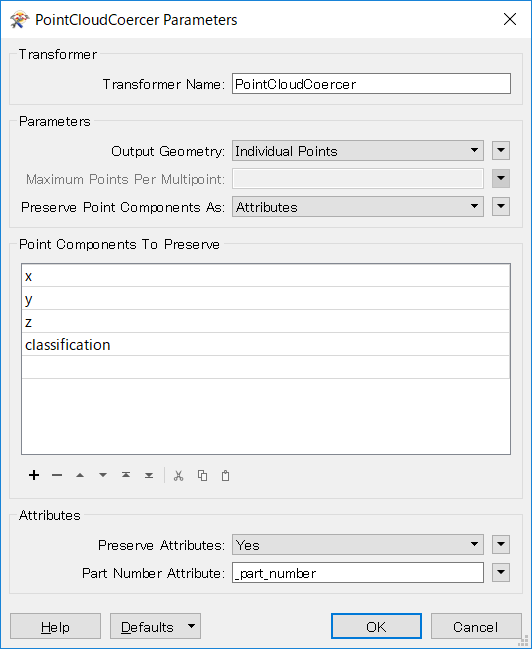
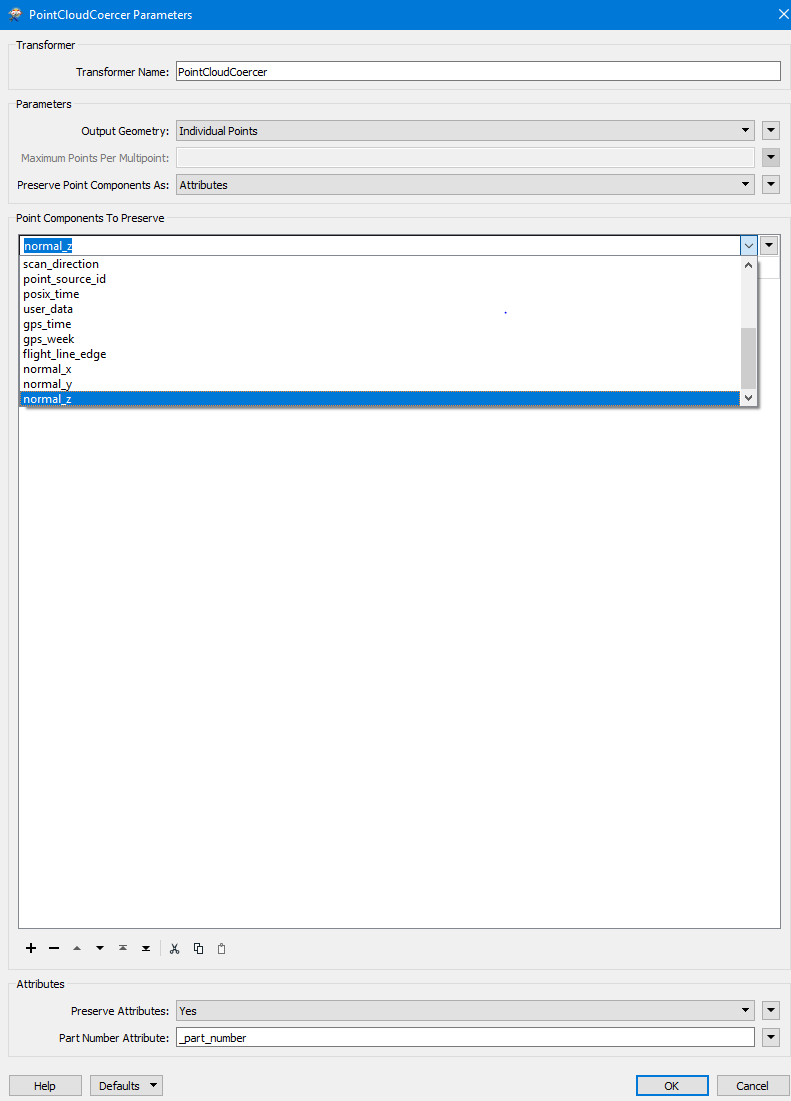
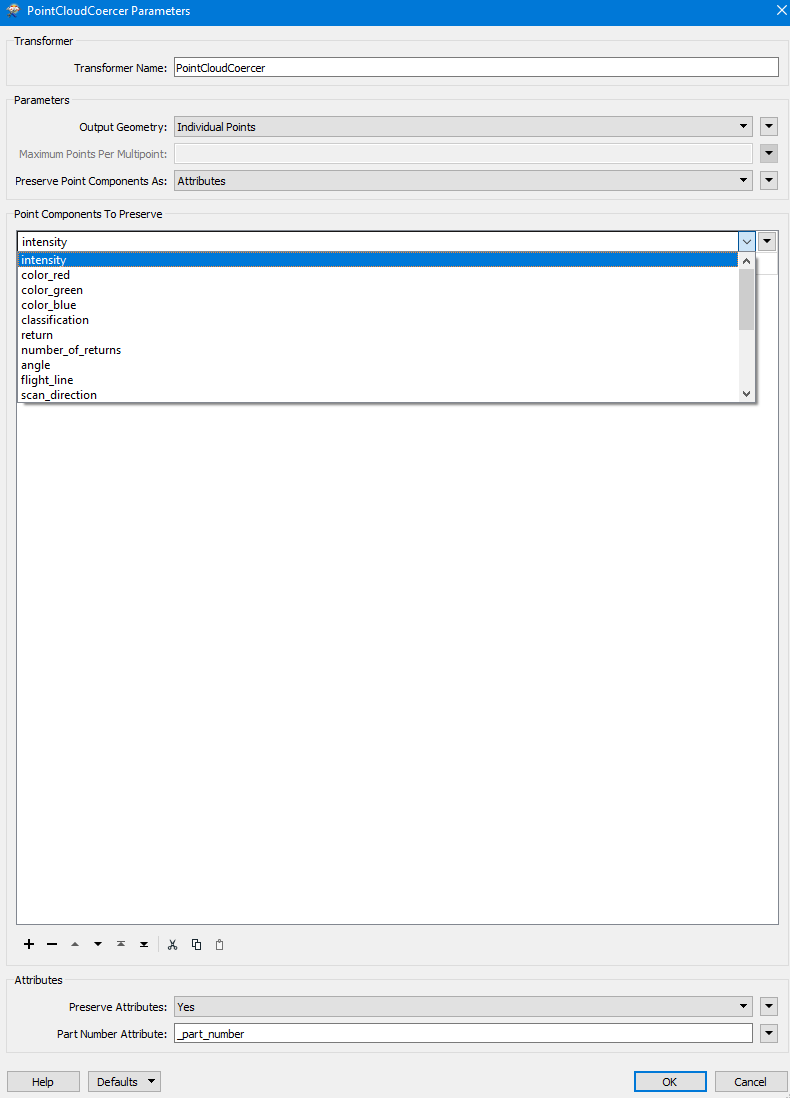 doesnt work. I do not know if it is to do with my initial PointCloudSplitter or what else.
doesnt work. I do not know if it is to do with my initial PointCloudSplitter or what else.