Hi
I would like to make boundries around my pointclouds.
That way I can see if all my pointclouds cover an area.
I only know hullaccumulator, but that only makes a bounding box.
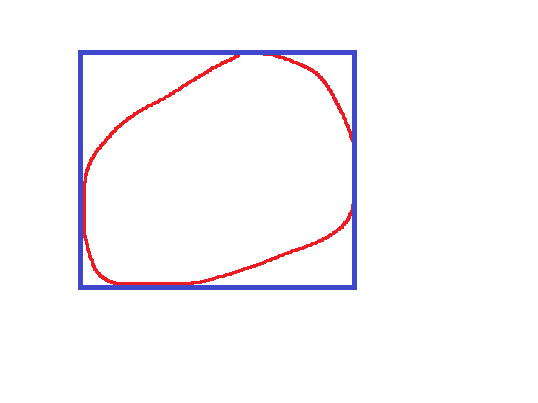
See the picture below. I want the red boundry and not the blue one that hullaccumulator makes.
 I'm trying the pointcloudcoerser before the hullaccumulator, but I don't know if that works and it takes sooooo looong...
I'm trying the pointcloudcoerser before the hullaccumulator, but I don't know if that works and it takes sooooo looong...
Is there a better way?
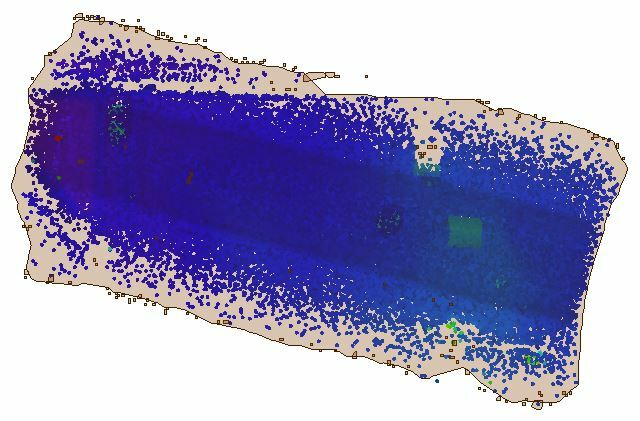
 Hillshade
Hillshade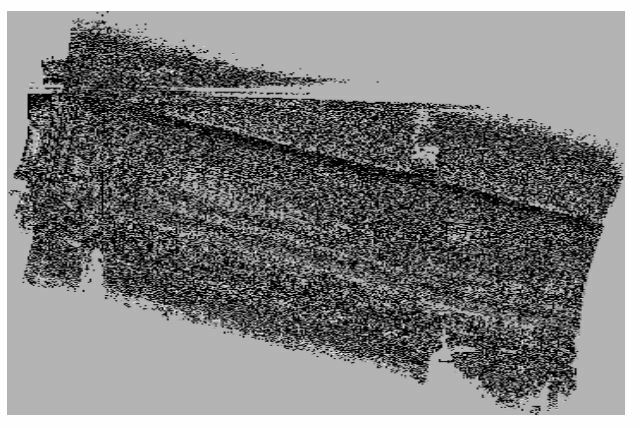 Hillshade converted to polygon, filtered, and dissolved.
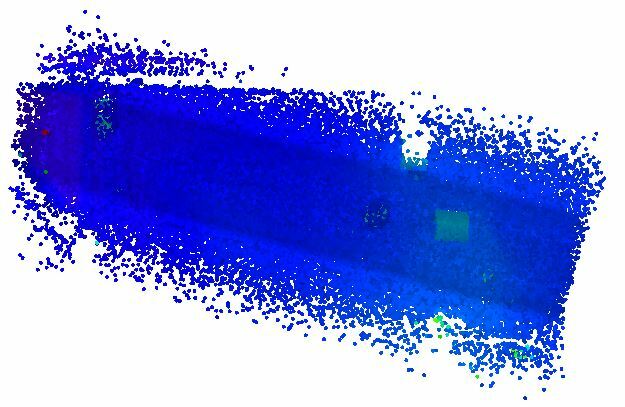
Hillshade converted to polygon, filtered, and dissolved.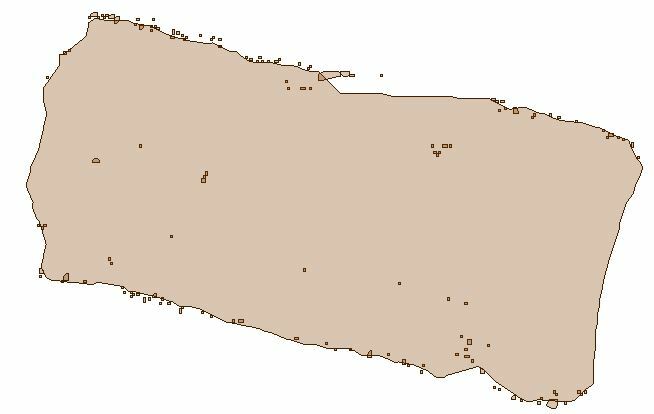 Point cloud overlaying the new polygon.
Point cloud overlaying the new polygon.