Hi @Evie Lapalme ,
My point clouds are quite large. Billions of points. So I'd like to avoid the PointCloudSplitter.
How would I use the PointCloudFilter? I haven't been able to think of anything. Basically I want to count the unique time stamps (I've rounded them to the nearest second in a new component first). I was thinking maybe I could filter the first point for each time by comparing a point's component to the previous point, but I'm not sure how you would do this. I don't think there is a way to compare components like this, like you can with attributes
Thanks
Hi again @james_c_452, this does make sense thanks for elaborating :) I talked to a colleague and we agree that we should get away from the PointCloudSplitter and PointCoercer transformers if we can because of performance.
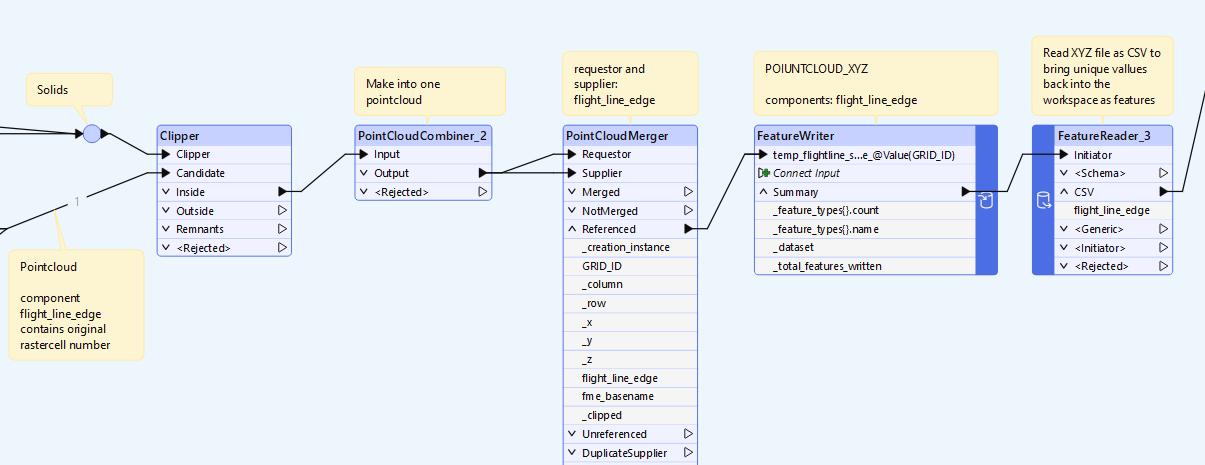
I think we can solve this with a bit of experimentation and a combination of transformers such as: PointCloudPropertyExtractor, PointCloudExpressionEvaluator, PointCloudSorter, PointCloudStatisticsCalculator, and PointCloudMerger. You could also involve the conversion from point cloud to raster as they are treated similarly. If you could provide us with some sample data we might be able to experiment with you on this, hard to tell what will work specifically with your data, what expressions to use, etc.
The PointCloudMerger is one of the more powerful transformers for simplifying workspaces as it will merge everything based on what its matching and only output points where the match key is unique. So we might be able to match on time and just keep the first point per time for example.