
Question
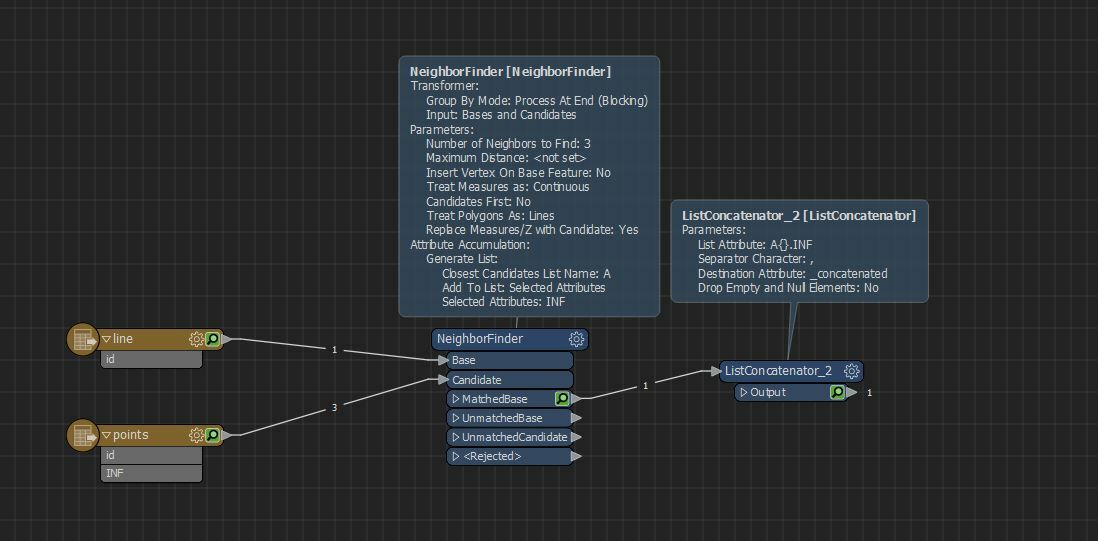
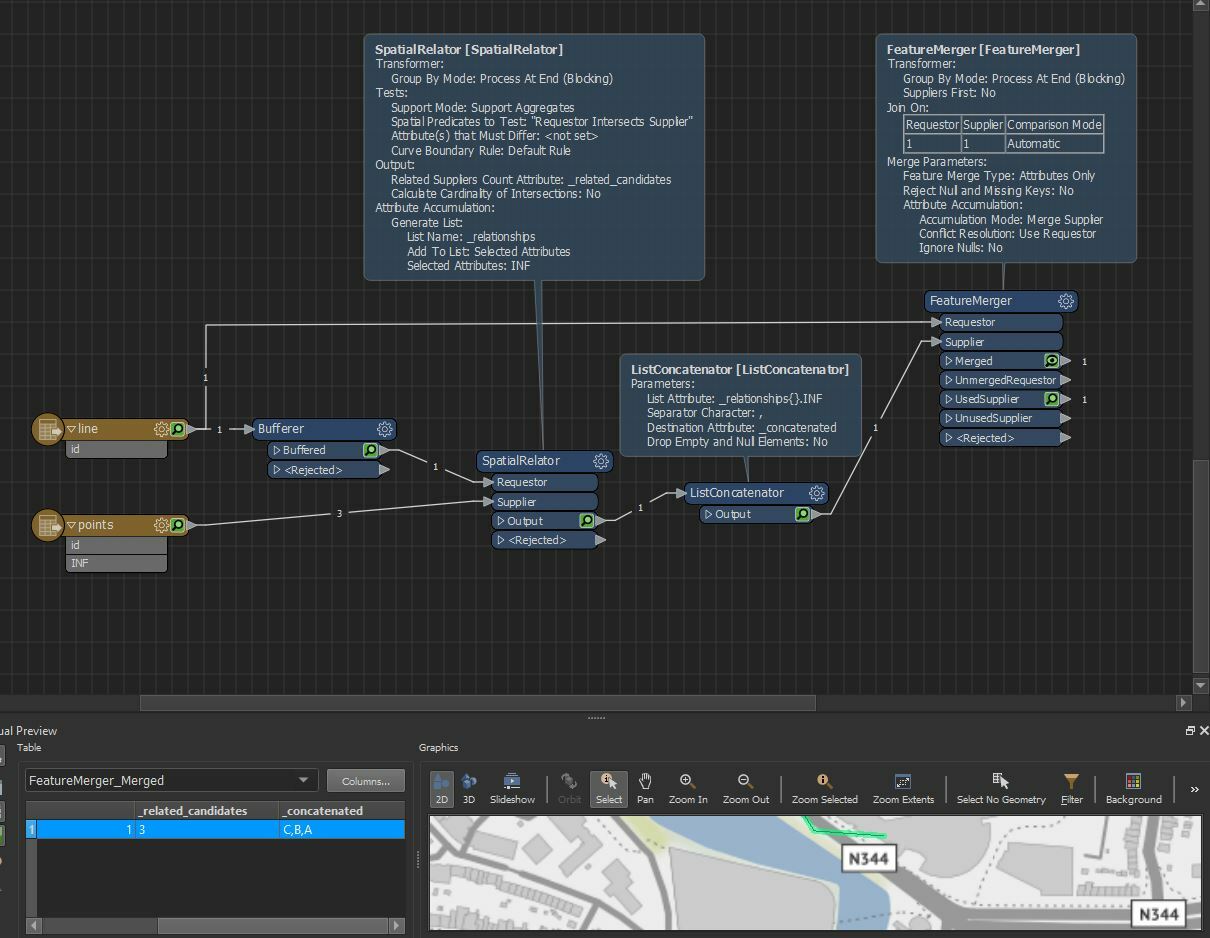
I have a line & point shapefiles, I want to create a one-to-many spatial join so that the line would get all the point attribute information which are present in its surroundings, i tried some methods but no proper result, can someone please suggest
 +6
+6- Contributor

I have a line & point shapefiles, I want to create a one-to-many spatial join so that the line would get all the point attribute information which are present in its surroundings, i tried some methods but no proper result, can someone please suggest ?



Login to the community
No account yet? Create an account
An FME Account is required to contribute
LoginEnter your E-mail address. We'll send you an e-mail with instructions to reset your password.