@kris_ab Probably use B as the Base and A as the Candidate.
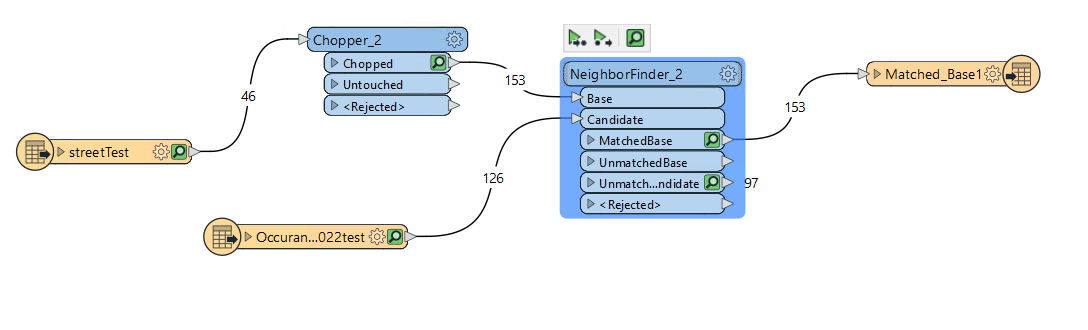
So in the example above, perhaps try using the output from the Chopper (A) as Candidate and Occurance (B) as the Base. Then add a VertexCreator to set _closest_candidate_x/y as the new point geometry (which should be the location of the intersection (A).
You're already using the AttributeAccumulation -Merge Attributes so your intersection Occurrance points should also have the Intersection attributes.
In your example above you are using Generate List, which will have all the nearest Occurrences (B) listed, but then you have to deal with that list, so reversing the Base/Candidate will make you life easier. So you can uncheck that.
I've attached an example workspace (FME 2022.2)


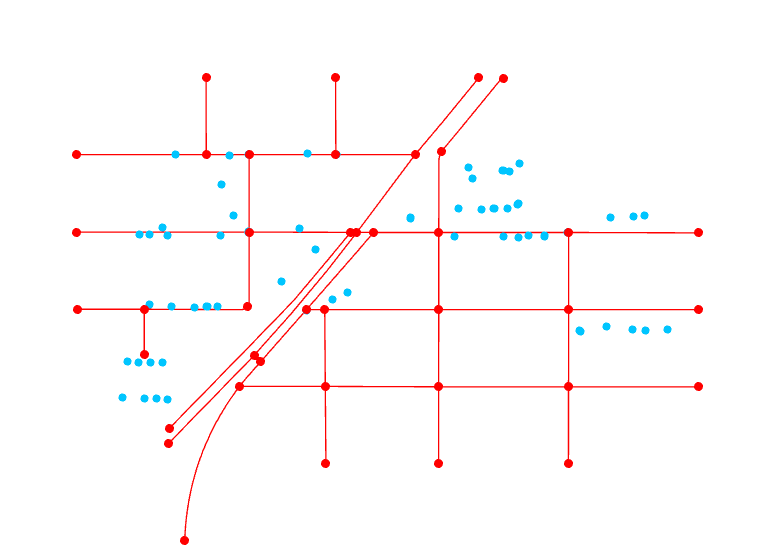 red dots are vertex, I would like to get the information from blue dots into red dot based on the proximity. So the attributes can go from blue dots to red dots. SO, I can use red dots for my final products with the information from red dots. One red dot may have information from one blue dot or multiple blu dots. So, the red would be one on top of another. I tried to use neighborfinder but i only get one red dot has only one blue dot's attribute information. I must have one red dots have more than one blue dots.
red dots are vertex, I would like to get the information from blue dots into red dot based on the proximity. So the attributes can go from blue dots to red dots. SO, I can use red dots for my final products with the information from red dots. One red dot may have information from one blue dot or multiple blu dots. So, the red would be one on top of another. I tried to use neighborfinder but i only get one red dot has only one blue dot's attribute information. I must have one red dots have more than one blue dots. 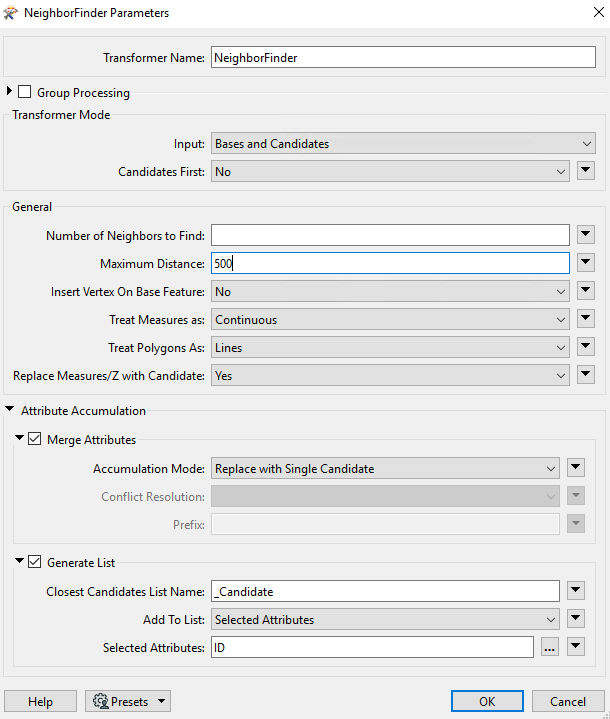 this is parameter for NeighborFinder transformer
this is parameter for NeighborFinder transformer