
Hi,
I have a folder full of las files from a big area, but I want to find out which las files exactly are inside my zone if interest (.shp) .
I have tried a hullaccumulator to get a hull from each point cloud, to then compare these with my .shp file using a SpatialRelator, but it doesn't seem to work or I did something wrong in the options. My goal is to obtain a list of these las files.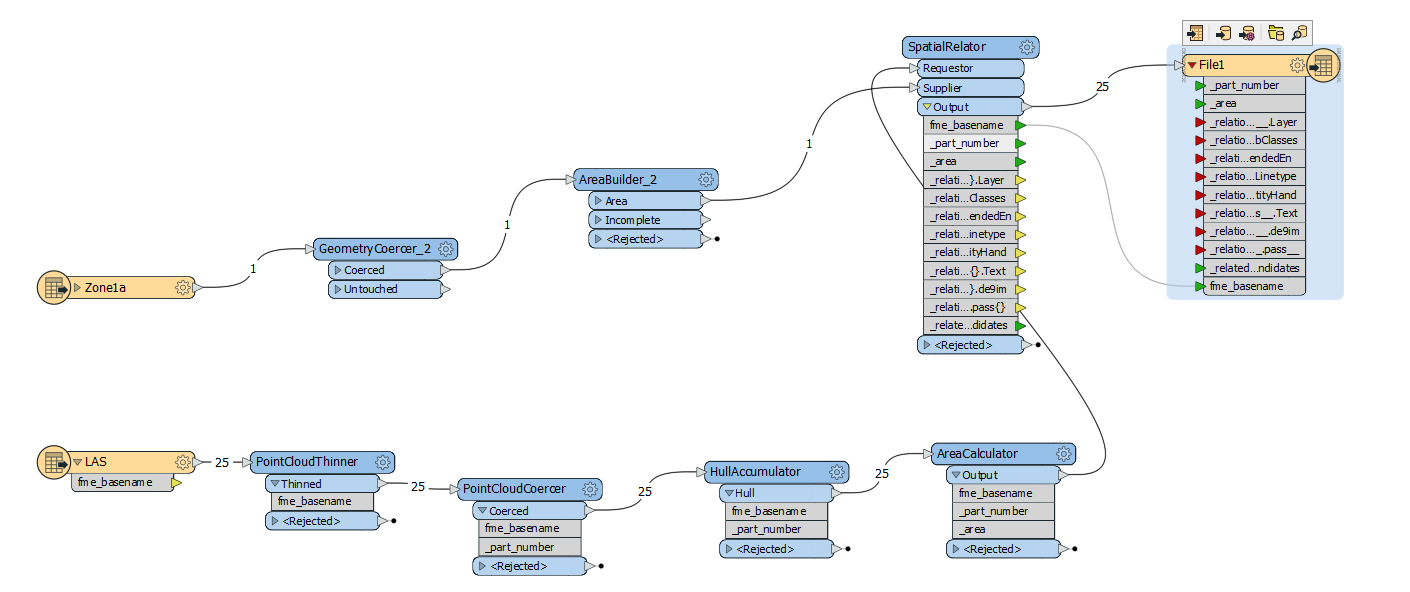
Cheers



