



Hi all,
I'm having a bottle-neck on a workbench due to the use of the transformer "NeighborFinder". This operation only is taking around 18 hours.
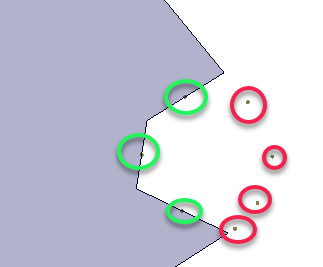
The goal is to find around 200K points to the nearest Polygon (having around 10K). Points that I want are quite near, not touching some times. Also, there are some points that are farther and I don't want to have them on the "MatchedBase" output (red ones):
These are the transformer parameters:
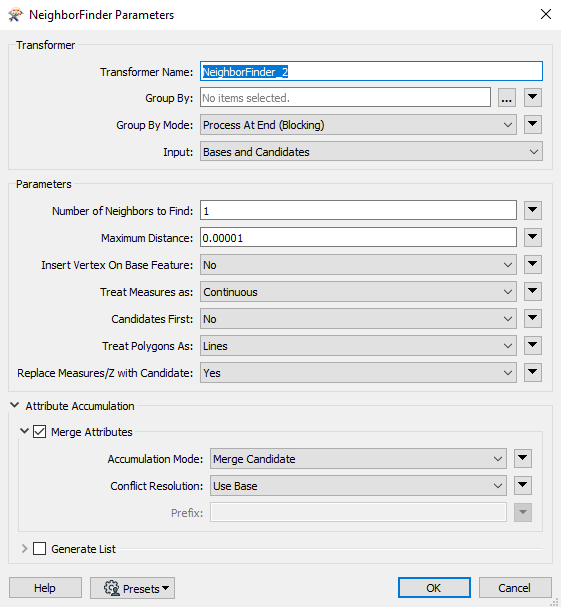
Also, attributes from Polygon need to be transferred.
I don't see the option to make the search by Groups, since I cannot foresee which points belongs to certain Polygons beforehand. Also, reducing the number of features is not possible.
Any suggestion?
Something that could be faster on that search?
Thanks!
Juanma,



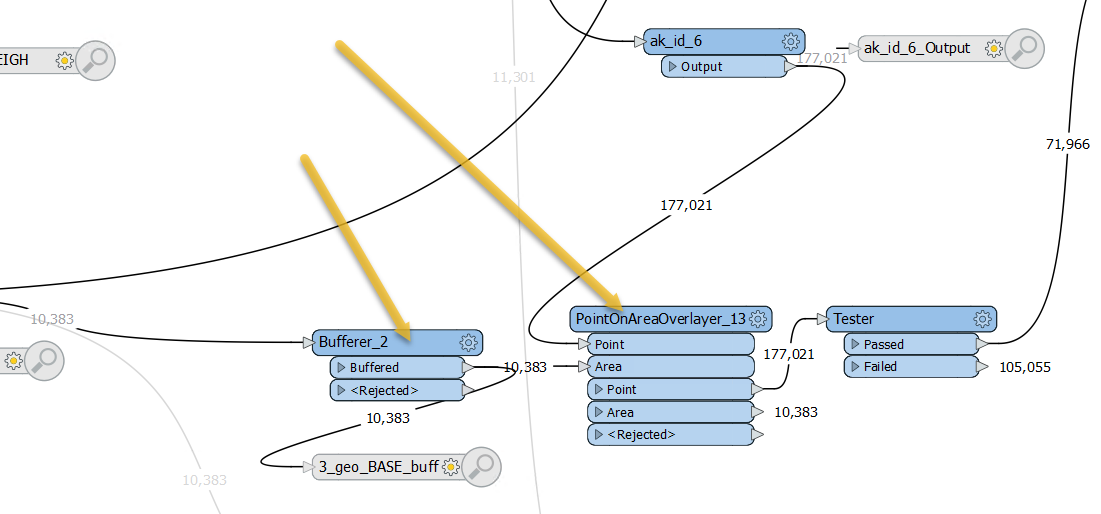 It is now taking just a few minutes!
It is now taking just a few minutes!
