
I've been trying to work out how the light source definition is actually used within the SurfaceFootprointReplacer (with shadow mode set to perpendicular) transformer without luck.
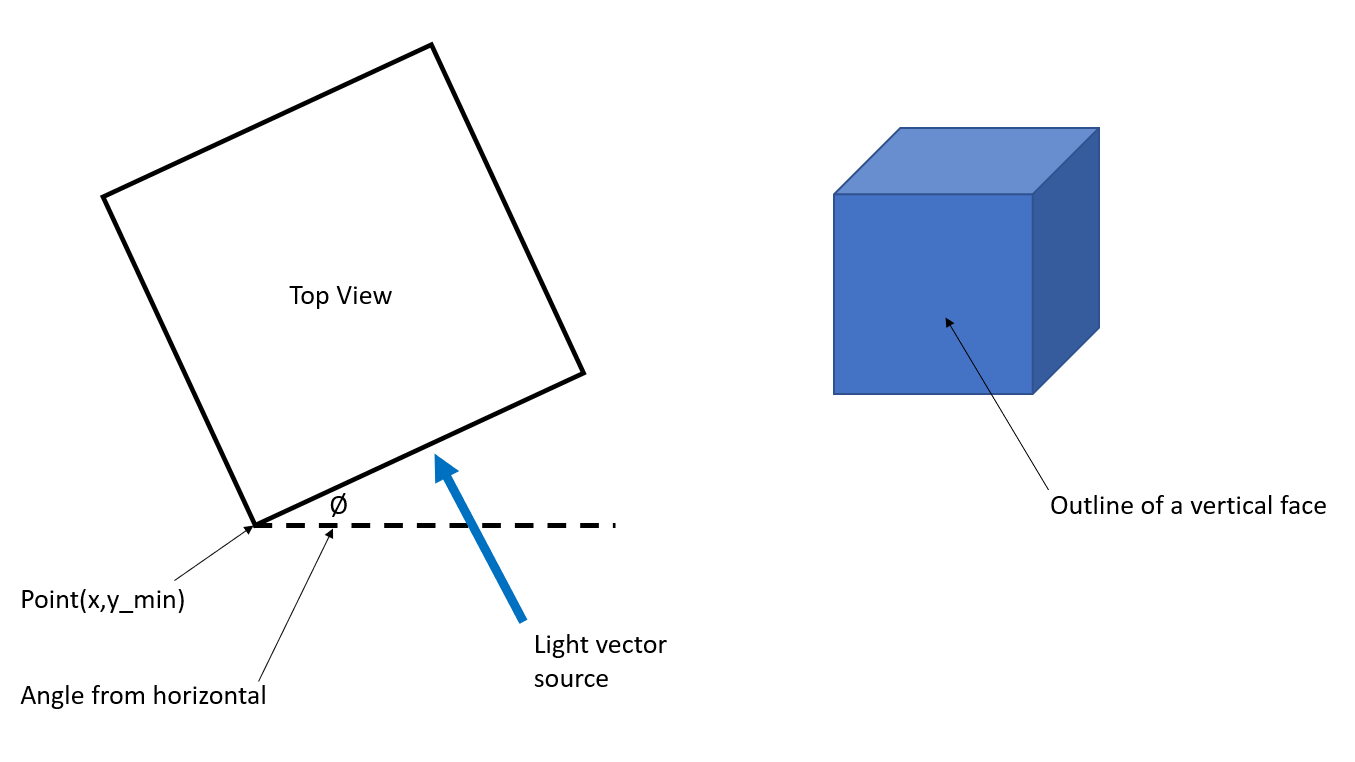
My end goal would be to extract an estimated surface of a 3D shape for a hydraulic radius calculation. If I know the shape's rotation from the horizontal axis, how does this get defined by the vector parameters?
 Defining a point along the face didn't appear to be the right answer, nor was offsetting a point...
Defining a point along the face didn't appear to be the right answer, nor was offsetting a point...
A simplified workflow showing a cube rotated 45° is attached to illustrate the issue.
Best answer by nampreetatsafe
View original


