Hi,
I need to design the following process:
1. I move the object to a specific point (x, y)
2. I check if it fits in another training ground
3. generate another object with offset (dx)
I repeat steps until dx <1.01
I did it like this:
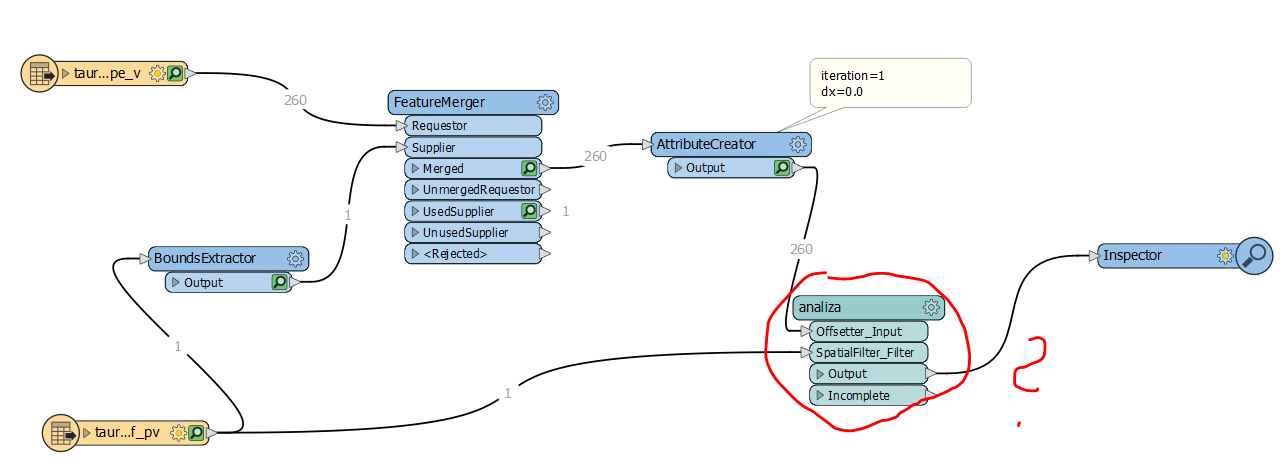
When I created the loops I got a message
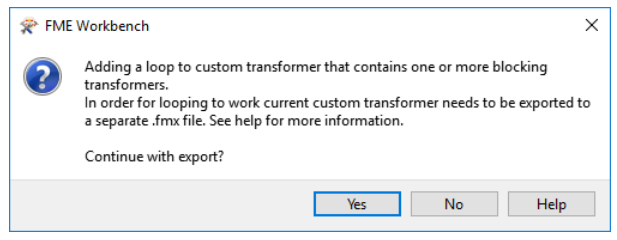
So I click YES and create custom transformer:
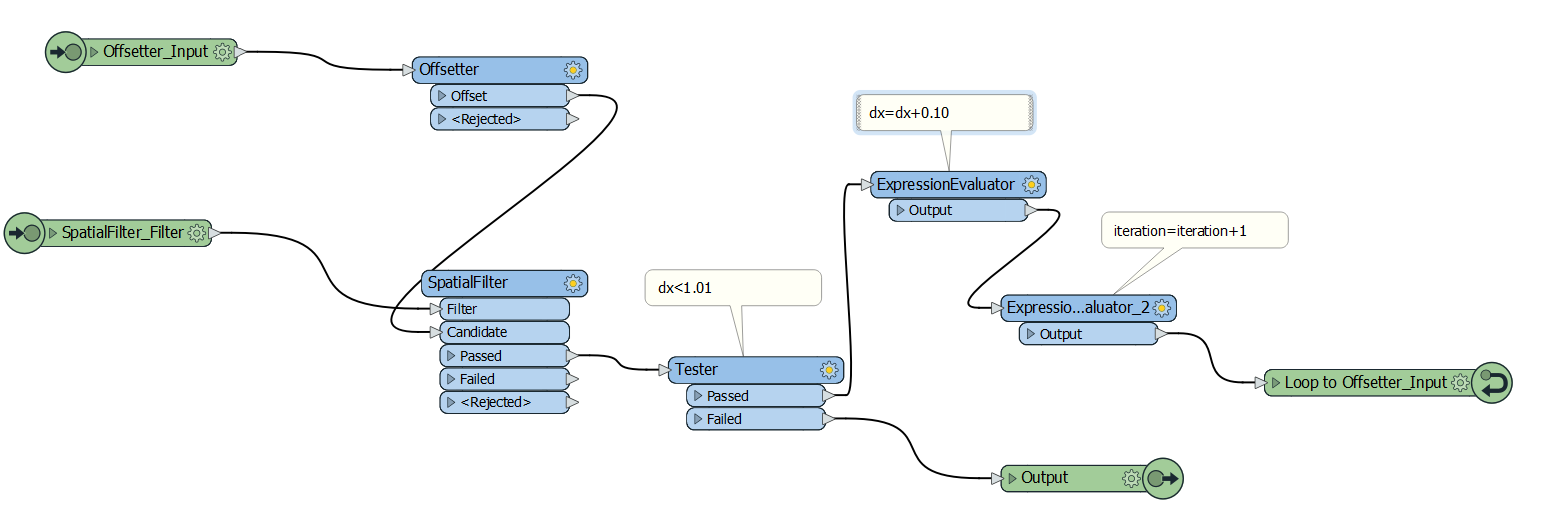
But when I start the process I don't get the result from the loop...
Does anyone know the easier way? or knows what I have to change?