I have a set of point objects with rotation attributes. I would like to use this rotational value to go in a straight line in that direction until it encounters something. In this case it will be a line object. Finally I would like to retrieve a attribute from this neighbouring line.
The Neighbour finder will pick the nearest object, but I want to pick the first object along the points bearing/heading. Is there some way to do this?
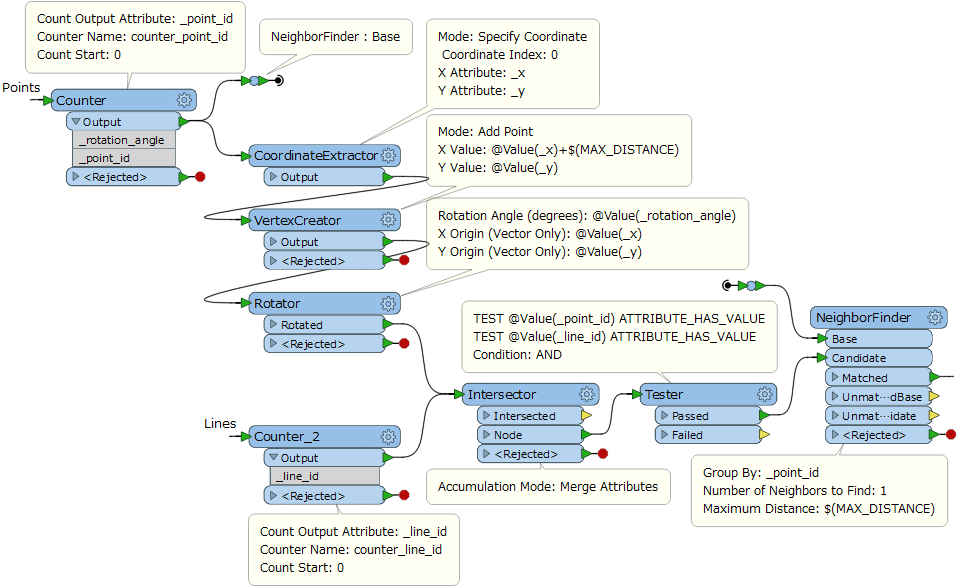
Best answer by takashi
View original